Задачи удобнее решать, когда они формализованы, т.е. представлены в одной из стандартных форм, методы решения для которой известны
Существует несколько типовых форм представления задач. Основные из них – поиск в пространстве состояний и поиск на графах «И-ИЛИ».
Процедуры поиска м/б информированными или неинформированными. Информированные – когда известна какая-либо дополнительная информация кроме минимально необходимой. Например: минимальная информация для поиска пути – матрица связи городов дорогами, к дополнительной информации относится: качество дорог, посты ДПС, длина дорог. Дополнительная информация позволяет быстрей найти наилучшее решение. Для ее использования разработаны различные эвристические алгоритмы.
Когда информация минимальна, то используются методы полного перебора в том или ином варианте. 1) Поиск в пространстве состояний.
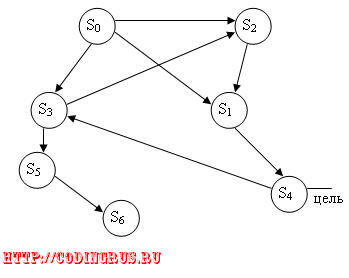
Решение задачи представляется как поиск путей на множестве состояний. Есть тройка множеств (S0,F,Sy), где S0- множество исходных состояний, Sy – множество целевых состояний, F- множество операторов, переводящих одни состояния в другие. Требуется найти путь из S0 в Sy. Решить задачу – найти последовательность операторов f1,f2,f3,…,fk,(fi принадлежит F), f- преобразовывает начальное состояние в целевое.
Поиск удобно вести на графе. Вершины – состояния, дуги – операторы перехода.
Если Pi->Pj , то Pi вершина-родитель, а Pj вершина-преемник, потомок, дочерняя. Раскрытие вершины – определение множества ее потомков.
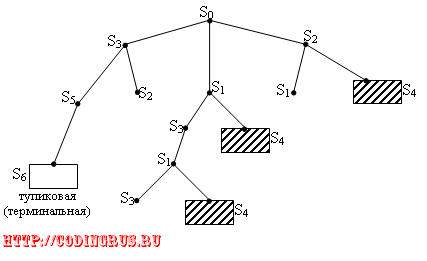
Процесс поиска удобно отображать в виде дерева. Пример: Дерево: на каждом шаге происходит:
1) проверка «Новое состояние – целевое?» Если «Да» то конец;
2) Определение потомков, раскрытие вершин;
3) Выбор направления перехода и его выполнение.
На этом примере очевидно:
1) При неуправляемом переборе возможно зацикливание(S0->S3->S2->S1->S3);
2) Есть тупиковые ветви и тупиковые вершины (S6), она – терминальная и нецелевая;
3) Существуют различные варианты достижения целей. Стратегия поиска – функция от имеющейся информации, стоимости поиска и т.д.
Из неинформированных процедур, наиболее известный – поиск вглубь и поиск вширь.
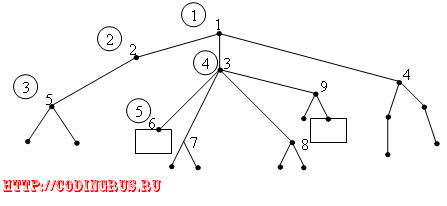
При поиске вглубь, вершины раскрываются в порядке их порождения.
Часто используют ограничения на глубину поиска, т.е. задают предельное количество шагов, после которых возвращаются.
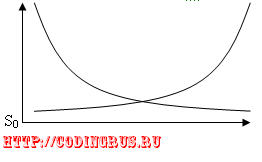
При поиске вширь, вершины раскрываются в порядке удаления от центра поиска (исходной вершины). Преимущества поиска вширь: быстро находятся решения, если они сравнительно близко Недостатки: Необходимо запоминать все множество путей на дереве.
В кружочках на рисунке – порядок поиска при использовании поиска вглубь.
Трудоемкость поиска решений принято оценивать количеством раскрытых вершин. Объем раскрытых вершин возрастает по мере удаления от исходной:
При разработке был предложен встречный поиск.
Поиск считается завершенным, когда в обоих списках появится хотя бы одна одинаковая вершина.
Если из любой вершины есть путь в любую другую, можно применить безвозвратные методы поиска.
В противном случае, применяется методы поиска с возвратом (бэктрекинг).
Существуют простейшие варианты с возвратом на один шаг (хронологический бэктрекинг) и более сложные методы возврата.
При их использовании (бэктрекинг управляемой зависимостью) возврат по дереву поиска идет сразу на несколько шагов до точки, с которой начиналась дорога к неуспеху, запоминаются неудачные ходы, зацикливания, и далее эти пути уже исключаются.
Если исходное состояние одно , а целевых много, то лучше применять прямые методы поиска.
Если исходных состояний несколько, а целевое – одно, то лучше применять обратные методы.
При одинаковом числе состояний, прямые и обратные методы эквивалентны.
Опубликовал Kest
January 11 2010 11:45:28 ·
0 Комментариев ·
9589 Прочтений ·
• Не нашли ответ на свой вопрос? Тогда задайте вопрос в комментариях или на форуме! •
Комментарии
Нет комментариев.
Добавить комментарий
Рейтинги
Рейтинг доступен только для пользователей.
Пожалуйста, залогиньтесь или зарегистрируйтесь для голосования.
Нет данных для оценки.
Гость
Вы не зарегистрированны? Нажмите здесь для регистрации.
 Главная
Главная Каталог файлов
Каталог файлов